原文:Photon: Fault-tolerant and Scalable Joining of Continuous Data Streams
Photon 是谷歌广告系统中用于 join 广告曝光日志流和点击日志流的一套系统。
数据流 join 为什么没用 flink 这类通用的流式处理框架?
数据流 join,特别是广告数据流 join,技术上难在哪里?
任一条流都可能乱序或延迟,广告点击涉及计费的问题,计费不能多算广告主的钱,也要尽可能避免漏计费,降低广告收入损失。
该系统在谷歌生产环境中每分钟处理百万级的事件,端到端延迟小于 10 秒(注:对于广告实时竞价的广告主而言,这个延迟的长短很重要)。
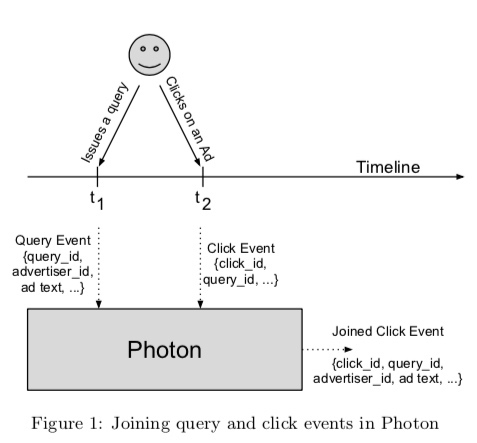
广告曝光、点击整体流程为:
- 用户搜索某个关键词时,谷歌的服务器会返回广告和搜索结果。广告服务器会将广告 query 和结果数据作为日志发送到多个日志数据中心(multiple logs-datacenters),最终持久化存储在 GFS 上。每次 query 都会被赋予一个唯一性 ID query_id
- 对于搜索结果中的广告,用户可能会点击。广告点击会触发一次请求,谷歌的后端服务器将请求重定向到广告主的网站。在重定向之前,谷歌服务器会将点击事件记录到日志中,发送到多个日志数据中心。点击事件日志中包含广告曝光的 query_id,点击事件也会被赋予一个唯一性 ID click_id
计费是在点击之后,但计费所需要的广告出价等信息是在曝光请求中记录的,出于数据敏感性、带宽、请求处理延迟等多方面的考量,计费相关的信息并不会返回到用户客户端,也就是说点击请求中不会包含计费直接相关的信息,需要将 点击日志 和 曝光日志 做一次 join,得到一条完整的上下文日志,才方便做后续计费等处理。
论文中提了到该系统解决了几个技术挑战点:
- 仅处理一次语义(exactly-once semantics):实际上达到的是 最多处理一次语义 (At most once),也就是绝对不能多算钱,然后尽可能避免少算钱
- 自动化的跨数据中心容错:也就是多数据中心部署,如果有一个数据中心不可用(比如 网络问题),也不会影响系统正常处理数据
- 横向扩展性高:也就是加机器就能应对消息量增长
- 低时延
- 流乱序
- 主流延迟(delayed primary stream):这里说的”主流“是曝光日志流
在我看来,该系统的亮点主要在前 3 点,后边细说。
为解决 1、2 挑战点,系统引入一个服务模块:IdRegistry,这个服务的功能:提供点击事件 id(click_id) 的存储和查询,如果某个 click_id 可以从 IdRegistry 中查到,则表示该点击事件已经处理过了,不要再次处理。
并且,多数据中心都部署一套 Photon,但 IdRegistry 共享一个,多套 Photon 系统的输入相同,那么 IdRegistry 除了提供去重的功能,还提供了负载均衡的功能。正常情况下,假设 N 个数据中心,每个数据中心 Photon join 产出的日志数据量为总量的 1/N。
当某个数据中心的 Photon 不可用时,相当于其负载动态地重新分配到其它数据中心,虽然总体能力上降低了,但只要处理能力有冗余,就不会影响正常处理。
那么很明显,IdRegistry 很可能成为系统的短板;另外,曝光/点击的唯一性 ID 如何生成?如果由一个中心服务来提供唯一性 ID 的生成,那么这个服务也会成为系统的短板。
所以,系统没有选择一个中心服务来生成唯一性 id,而是将 id 设计为包含3个部分:ServerIP、ProcessID、Timestamp。由于日志文件中行之间大致是按照时间戳有序的,所以 id 中包含时间戳的一个额外好处是:根据 id 即可大致定位日志内容。另外,还有一个和横向扩展性相关的好处,后边细说。
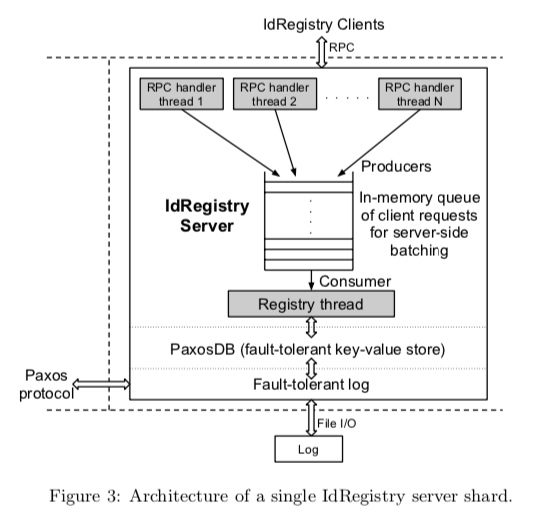
IdRegistry 的角色至关重要,所以将其实现为一个基于 Paxos 协议的分布式系统,根据 CAP 原则,可用性(此处是指吞吐能力)受限。解决方案是:
1、提高单机处理能力:服务端攒批处理,尽可能减少网络往返次数导致的等待(特别是:由于 IdRegistry 是跨地域分布式,部署上节点之间最大延迟是 100ms 左右)
2、分片(Sharding):根据 click_id 进行分片,但如果是固定分片,那么随着以后业务量增大,不好扩展。Photon 使用了一种基于时间段动态分片方案,这个方案基于 click_id 自带时间戳。大致逻辑是:使用一个配置,内容大致如下:

对于每个 click 日志,先根据 click_id 中的时间戳,判断分片数,并计算对应的分片 id。
系统的模块关系图如下所示:
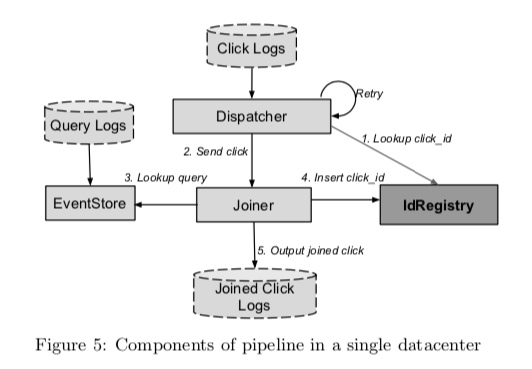
Photon 的 Dispatcher 模块并没有以 Kafka 这种消息队列作为输入,而是直接监听文件系统中的日志文件变更,这一点有点奇怪,不是特别理解。
Joiner 负责实际的 join 工作,由于 3、4 都比较耗时,所以为了尽可能减少 Joiner 的工作量,Dispatcher 将点击事件日志发送给 Joiner,会先到 IdRegistry 中查一下该事件是否已被处理过,从而起到过滤作用。因多数据中心部署,实际过滤比为:$ \frac{N-1}{N} $。
为了确保 Joiner 高可用,Joiner 是无状态的,向 Dispatcher 提供 RPC 接口,Joiner 内部有限流,以保证不会因为单个 Joiner 负载过大,导致处理时延增大。Dispatcher 调用 Joiner 失败后会重试,重试使用的是指数退避算法。但处理失败的点击事件,是另外存储在 GFS 上,应该是由另外的线程来负责重试,不会影响正常的事件处理。
当 Joiner 收到一个点击事件的处理请求时,会根据点击日志数据中的 query_id 从 EventStore 查询曝光日志详情,但因为曝光日志数据流可能会有延迟,所以可能会查不到,查不到且发现 click_id 中的时间戳早于某个阈值(比如是 N天前的一个事件),Joiner 会将该 click_id 标记为不可 join,然后向 Dispatcher 返回成功;如果 click_id 中的时间戳不早于阈值,则向 Dispatcher 返回失败,由 Dispatcher 来重试。
为了确保不会多计费,Joiner 在将 join 结果写入 Joined Click Logs 之前,会向 IdRegistry 注册 click_id。
假设注册实际上已成功,但因网络原因或 RPC 调用超时 Joiner 未收到成功响应,此时怎么办?Joiner 向 IdRegistry 注册 click_id 时,会附带一个额外的 唯一性 token,也包含3个部分:Joiner 服务器地址、进程 ID、时间戳,IdRegistry 会把这个唯一性 token 作为值存储下来,所以对于这种情况,Joiner 可以重复发注册请求,如果 IdRegistry 根据 token 发现已注册成功的 click_id 和当前收到的 click_id 来自同一个 Joiner,则也会返回注册成功。
假设注册成功,合并结果写入异常,异常分为 2 种,需要解决:
- 写入之前,Joiner 节点宕机或重启
- 合并结果实际写入成功,但因为网络原因,Joiner 未收到响应
为尽可能减少因某个 Joiner 节点硬件异常导致的 join 结果丢失,IdRegistry 对于单个 Joiner 的请求有限流,这个限流会间接导致 Joiner 对 Dispatcher 限流。
为了进一步减少因为上面2种异常情况以及其它异常导致的 Join 结果丢失,Photon 还提供一个校验系统:获取原始点击事件日志,如果该日志 click_id 在 IdRegistry 中存在,但合并结果中不存在,则根据 IdRegistry 存储的对应 click_id 的 token,判断对应的 Joiner 是否存活,如果存活,则交于该 Joiner 重新处理,如果对应的 Joiner 已不存在,则从 IdRegistry 中删除该 click_id 记录,然后交于任一 Joiner 来处理,都一样。
EventStore 获取原始的曝光日志,向 Joiner 提供查询接口,返回原始的曝光日志内容。
基于时间局部性,EventStore 内部分 2 层,第一层为 CacheEventStore - 一个类似 Memcached 的 KV 内存映射,K 是 query_id,V 是曝光日志内容,基于一致性哈希算法根据 query_id 进行分片,缓存几分钟最新的曝光日志数据,可以命中 90% 左右的查询请求。
如果 CacheEventStore 查询 miss,则交于第二层 LogsEventStore 来处理。LogsEventStore 对 query_id 和 曝光日志所在的日志文件及目标起始行(因为日志文件数据大致按时间戳有序,根据 query_id 中的时间戳大致可以知道查询的起始行)建立索引(实际存储在 BigTable 中),查询时,先根据 query_id,查到目标日志文件和起始行,然后从日志文件中读取原始曝光日志内容。